Process Simulate Standaloneのご紹介
| 営業本部 営業推進室 販売管理部 部長 櫻田 祐二 |
はじめに
「人とシステム No.51」にて、工程の設計・管理・シミュレーションツール Process Designer / Process Simulateをご紹介しました。このたび、そのシミュレーションツールProcess Simulate(略称:PS)を単独で使用することができる、Process Simulate Standalone(略称:PSS)がリリースされましたのでご紹介いたします。
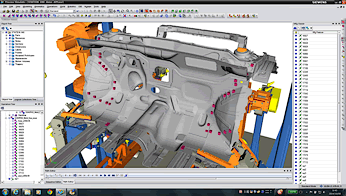
PSSは、複数台のスポット溶接用産業ロボットやハンドリング用産業ロボットを使った大規模な製造工程の計画・検証を、3次元のバーチャルな空間で行うためのデジタル・マニュファクチャリング・ソリューションです。
近年、さまざまな分野で活躍する産業用ロボットを中心とした生産設備を最大限に生かすには、製品およびロボットといったリソースの3次元データを活用したバーチャルな製造現場(バーチャル・ファクトリィ)でのシミュレーションによる検証が不可欠です。
その中で、複雑な生産工程を検証し、現場で起りうる干渉等の不具合を事前に検出、修正することで、より迅速な生産ラインの立ち上げを実現するとともに、生産の品質向上にもつながります。
また、バーチャルな製造現場で作り上げたロボットの動きは、最終的なアウトプットとして、各ロボットメーカーに対応したプログラム・フォーマットとして出力することができます。
これにより、高品質なロボットのオフラインティーチングの実現が可能となり、その結果、生産の立ち上げ期間の短縮を実現します。
PSSにはPSが持つ次のような多くの便利機能や自動化機能が組み込まれています。
- Project Point(溶接打点自動面直計算)
- Gun Search(ガン選択)
- Automatic Approach Angle(溶接ロケーションのガン挿入方向自動定義)
- Weld Distribution Center(複数台のロボットに対する溶接打点の割り振り)
- Automatic Path Planner(干渉回避経路 自動作成コマンド)
1. Project Point(溶接打点自動面直計算)
溶接打点の板組み情報を参照し、溶接する板に投影した位置情報を自動的に作成します。板組み情報などは、入力情報としてExcelなどに定義されている必要があります。
作成される位置情報には、ガンの挿入方向などの情報もあります。
2. Gun Search(ガン選択)
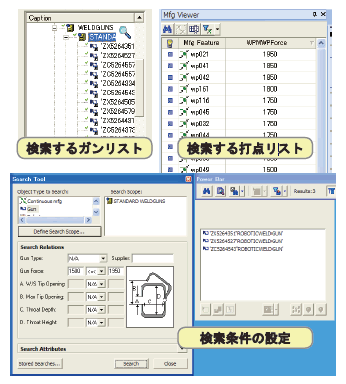
「溶接ガンの挿入性の検討」や「ガン選択」を行う機能です。打点情報のガン圧などを参照し、膨大なライブラリからガンを検索します。
設定した条件によってガンリストを絞り込み、対象となる溶接打点に対し、複数の方向から干渉状態をチェックして、挿入方向の仮決めを行うことができます。
3. Automatic Approach Angle
(溶接ロケーションのガン挿入方向自動定義)
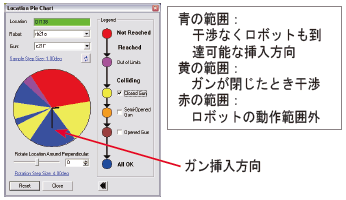
ガン挿入性確認機能(Pie Chart)で、溶接打点に対して、360度全ての方向からガンが挿入された場合の干渉状態を自動でチェックします。
その中で、最も干渉のない区間の真ん中をガン挿入方向として自動で決定します。
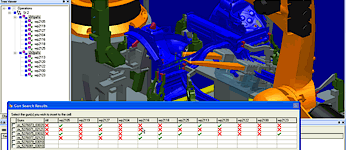
4. Weld Distribution Center
(複数台のロボットに対する溶接打点の割り振り)
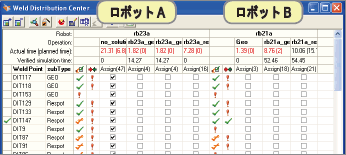
各ロボットが担当する溶接打点の数や合計時間(タクトタイム)を表で表示します。
また、各ロボットの各打点に対する到達性や干渉も同じ表に表示します。
溶接打点を担当するロボットを変更したい場合は、チェック'レ'の付け替えだけで簡単に変更できます。
この機能を使用することで、各ロボット間でバランスの取れた打点割り振りが簡単に行えます。
5. Automatic Path Planner
(干渉回避経路 自動作成コマンド)
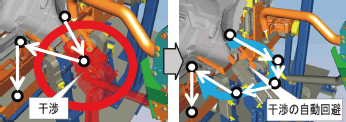
ロボットやガン、設備やワークとの干渉を回避した打点間の移動に対する経由点を自動で作成します。
ロボットの姿勢が大きく変わるような形状に対しても経由点を自動で作成するので、これまで人手に頼っていた作業が大幅に削減できます。
おわりに

ロボット工程の作成・検討において、多くの作業に機便利機能や自動化能が組み込まれています。
これにより、ロボット工程の効率化やサイクルタイム短縮のために費やしていた作業工数を大幅に削減することができ、ライン立ち上げまでの時間短縮・コスト削減を強力にサポートします。
関連するソリューション
関連するソリューションの記事
- 2022年07月01日
-
デジタルツインを実現する
産業用ロボットシミュレーションとバーチャルコミッショニング
- 2021年07月10日
-
4事業部のご紹介(2)
製造ソリューション事業部