ロールヘミング加工のシミュレーション
| 株式会社NTTデータエンジニアリングシステムズ ビジネスインテグレーション事業部 第二ソリューション企画部 第二営業課 櫻田 祐二 |
はじめに
産業用ロボットによる製造工程を3次元のバーチャルな空間で検証するデジタル・マニュファクチャリング・ソリューション「Process Simulate」は、おのおのの検証に特化したシミュレーターに分かれています。その1つ、「Process Simulate Continuous Manufacturing」は、アーク溶接、塗装の工程シミュレーションを行うだけでなく、オプションの追加により大規模な製造工程全体の計画・検証ができます。また、その廉価版としてアーク溶接、レーザー切断、ヘミング加工、バリ取り、シーリングなどに機能を限定した「RobotExpert」があります。
今回は、「Process Simulate Continuous Manufacturing」、「RobotExpert」による、産業用ロボットを用いたロールヘミング加工をシミュレーションする手順をご紹介します。
シミュレーションの手順
1. ロケーションとパスの作成
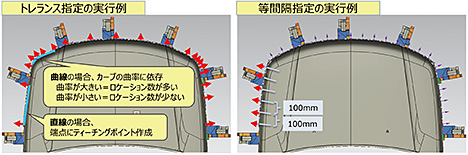
ロールヘミング加工を行う狙い位置を事前に作成した曲線をもとにすることで、ロケーションとパスを自動作成します(図1)。
- ロケーション:位置と姿勢の情報を持ち、ロボットの教示点に相当します。作成方法は、曲線の曲率に依存したトレランス指定と等間隔指定の2通りがあります。
- パス:複数のロケーションを順番につないだもので、ロボットの動きを定義します。
2. パスの編集
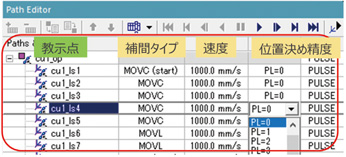
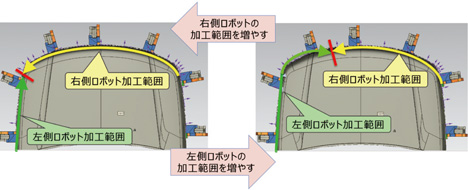
ロケーションとパスの関連などのプロセス構造を表示する「Path Editor」を用いて、パスの分割、結合、延長、ロボットへのパスの割り付け、シミュレーション順序の変更などを行います(図2、図3)。
3. パスの流用
既存のパスをコピーし(図4)、進行方向やローラー角度の変更により、 予備曲げ、本曲げのパスを作成します。

4. ローラー角度の変更
ロボットジョグ、または作業座標系を指示することで、ロボットの姿勢を変更し、そのロボットの姿勢を確認しながらローラー角度を変更していきます(図5)。ローラー角度は1つのロケーション、または複数ロケーションに対して変更できます。
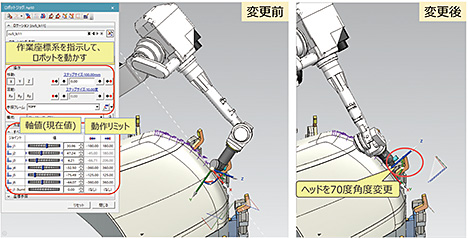
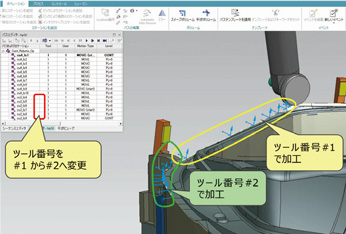
5. ヘッドの変更
「Path Editor」のツール番号を変更することで、変更したツールのヘッドの動きが確認できます(図6)。
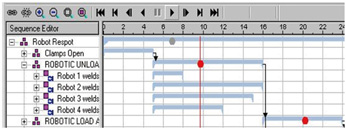
6. プロセス実行順の変更
シーケンスチャート(Gannt Chart)を使ってプロセスの実行順を変更することで(図7)、複数のロボットや設備のさまざまな動きの検討を短時間に行えます。
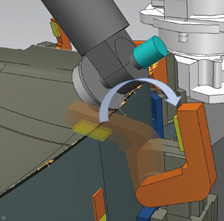
7. 設備との干渉回避
パス間の回避点は、ローラー角度の変更と同じ操作で作成できます。パステンプレートを使うと、パスの開始点と終了点から指定した距離に回避点を作成できます。
また、クランプ開閉の動作命令をロケーションに設定することで、ローラーと治具の干渉を回避できます(図8)。ロボット同士のインターロックも設定が可能です。
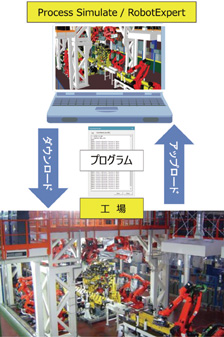
8. プログラムのアップロード/ダウンロード
各ロボットのコントローラーに対応したOLP(Off Line Programming)オプションを追加すると、実機ロボットとプログラムのアップロード/ダウンロードができます(図9)。
9. HTMLレポート
シミュレーション結果をHTMLファイルへ保存し、Webブラウザ(Microsoft Edge、Google Chrome、 FireFoxなど)で再生することが可能です。

おわりに
今回ご紹介した手順により、ロールヘミング加工用のロボットパスが簡単に作成できます。
これにより、従来のロボットティーチングの作業工数を大幅に削減でき、ライン立ち上げまでの時間短縮やコスト削減、ティーチング品質の向上を実現することができます。
関連するソリューション
関連するソリューションの記事
- 2022年07月01日
-
デジタルツインを実現する
産業用ロボットシミュレーションとバーチャルコミッショニング
- 2021年07月10日
-
4事業部のご紹介(2)
製造ソリューション事業部