
Process Simulate Spot
スポット溶接工程シミュレーション
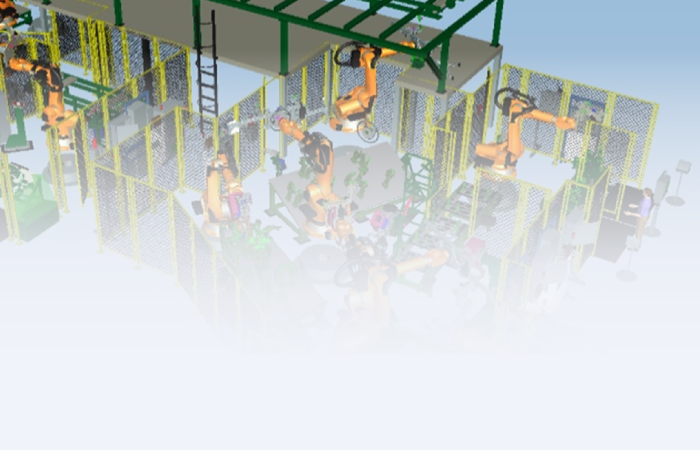
スポット溶接工程シミュレーション「Process Simulate Spot」は、スポット溶接ロボットで構成された製造工程を検証するツールです。
特長
これまでのロボットシミュレーションは、スポット溶接などの検討を行う上で、溶接位置、治具、ロボット、溶接ガンの3次元情報と設備仕様書(ガン圧や重量などの情報)を関係部署から集めて、検討作業を行っていたため、情報の収集に大変時間を要して、作業効率が上がりませんでした。
Process DesignerとProcess Simulate Spotは、これら3次元情報や設備の仕様などをデータベースに構築することで、情報収集にかかる時間を短縮でき、本来の検討作業に多くの時間を掛けられるようになります。
そして、充実した機能により、検討作業をスピーディーに行うことができるようになります。検討した工程はデータベースに蓄積され、類似形状の工程検討に使用することが可能です。これにより、少ない労力でスポット溶接のさまざまな検討を行うことができます。
ロボットの動きをプログラム化
各工程で行われるスポット溶接ロボットの作業に対して、次のようなさまざまな検証を行い、検証したロボットの動きをプログラムにすることができます。
- 作業時間の検証
- 設備や製品との干渉チェック
- スポット溶接打点の配分検討
- 溶接ガンの検討
- 治具の検討など
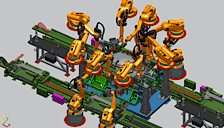
複数工程のシミュレーションとロジック検証
JT形式の軽量3Dデータの採用により軽快な操作性を実現し、一度に多くのロボットを表示することで、複数工程のシミュレーションを同時に行うことができます。
さらに、「Process Simulate Commissioning」アプリケーションを追加することで、実際のPLCのロジック検証などに役立ちます。
機能紹介
溶接ガンの検索機能
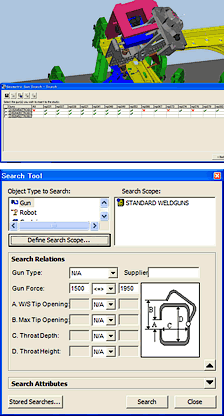
- 溶接ガンの仕様(ガン圧、重量、寸法等)による検索
- 溶接ガンの挿入性を含めた検索機能
この機能を使うことで、短時間で最適な溶接ガンを見つけることができます。
ロボット自動配置
スポット溶接打点位置を考慮した最適なロボットの設置場所を自動で見つけます。
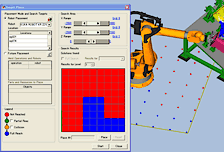
パイチャート
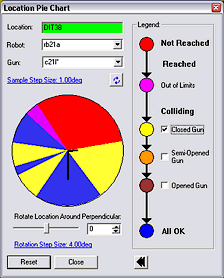
指定したスポット溶接打点に対して、ガンの侵入チェックマップを表示し、最適なガンの挿入方向を設定できます。
ガンの侵入方向最適化

指定したスポット溶接打点に対して、ガンの侵入方向を自動的に設定します。
この機能を使うことで、オペレーターの作業時間を大幅に短縮できます。
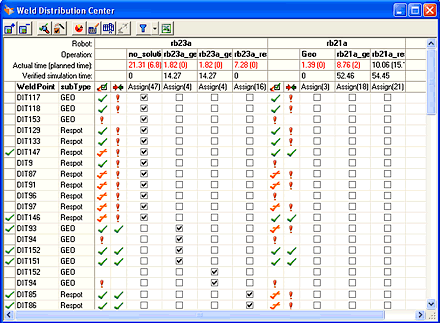
溶接打点の配分検討
各溶接作業に配分されているスポット溶接打点の一覧表を表示します。これにより、各ロボットの溶接打点への到達性や干渉、溶接にかかる時間などを見ながら、溶接打点の配分検討を行うことができます。
この機能を使うことで、工程の最適なサイクルタイムを実現することができます。
複数ロボットでの作業
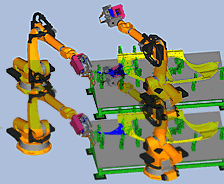
ロボット同士でインターロックを取りながら、干渉のない作業が確認できます。
ロボットや治具、センサーなど信号処理を含んだシミュレーション
Roboticsアプリケーションを追加することで、ロボット⇔ロボット、ロボット⇔治具、センサーなどさまざまな信号処理を含めたイベントベースシミュレーション※が可能です。
※ イベントベースシミュレーション:ロボットなどの作業開始条件を、複数の設備信号から判定するシミュレーション方式。
PLCと組み合わせた仮想ロボット工場シミュレーション
Commissioningアプリケーションを追加することで、実際のPLCとコンピューター上に再現した仮想工場を接続し、シミュレーションすることが可能です。
動作環境
推奨OS:Windows
Windowsのバージョンなど、詳しい動作環境については、当社の事業拠点へお問い合わせください。
※Process Designer、Teamcenter Manufacturing、Process Simulateの開発元はSiemens Digital Industries Softwareです。
Siemens関連の商標リストについては、こちらをご覧ください(外部サイトへ移動します)。
※WindowsおよびWindowsロゴは、米国Microsoft Corporationの米国およびその他の国における商標または登録商標です。
※その他の製品名は、それぞれの各社の日本およびその他の国における登録商標または商標です。
関連情報
- 2022年07月01日
-
デジタルツインを実現する
産業用ロボットシミュレーションとバーチャルコミッショニング
- 2021年07月10日
-
4事業部のご紹介(2)
製造ソリューション事業部
当製品に関するご質問やご不明点は、お近くの事業拠点までお気軽にお問い合わせください。
![]()